

I’ve been working on creating a clone of a Jason Huggins’ tapsterbot, parallel robot in my spare time . I wanted a friendly desktop robot that I could play with to prototype some computer vision applications. Jason was kind enough to open source the code, the BOM, and and all of the design files in a handy github repo. To build the robot I got a membership to the All Hands Active hackerspace here in Ann Arbor so I could fab the parts. All I really needed to build the robot was a 3D printer and a laser cutter. The robot has a really simple design that only requires a few nuts and bolts, three $8 servos, and an arduino for the controller. Once I got the parts it took me a little over a day to build the thing. I had a few slip-ups along the way so I wanted to collect all my knowledge in a blog post. Jason provided me with a ton of awesome photos of the robot in action so I could figure out how to piece it together. One critical component was how to correctly mount the robots arms onto the servo. Jason has provided an awesome video that shows you how to do just that. I now have everything assembled correctly and I plan to take it all apart and provide step by step instructions on how to put everything together. Currently the robot runs using node.js and I am making a python port using PyFirmata. With any luck I should have that work done within the next week and be able to show some more impressive demos. The first thing I want to do is build a path planning algorithm so I can prevent the tapsterbot from accidentally crushing its own arms or swinging into the legs that support it (I’ve already broken an arm). I’ve been reading up on the robot’s inverse kinematics, but I am not sure it lends itself to a closed form solution.
Tapsterbot Mark I
July 10th, 2013 | Posted by in automation | Automation Alley | demo | Fun! | pics or it didn't happen | python | robots - (Comments Off on Tapsterbot Mark I)ROBOTS FIGHT!
March 26th, 2013 | Posted by in Ann Arbor | automation | Automation Alley | demo | Education | FIRST | Fun! | robots - (Comments Off on ROBOTS FIGHT!)FRC830 has our second competition of the season in Livonia this weekend. We had the competition bot unbagged for a few hours today and decided to give our drivers some time to practice.
SightMachine write up in O’Reilly Radar
February 28th, 2013 | Posted by in Ann Arbor | automation | Automation Alley | computer vision | Detroit | entrepreneurship | In the news | industrial computing | Industrial Internet | Internet of Things | Maker Works | manufacturing | Michigan | SightMachine - (Comments Off on SightMachine write up in O’Reilly Radar)
Last week the SightMachine crew had the pleasure of meeting with a reporter from O’Reilly media. They just released a really nice write up about how we are helping to build the industrial internet right here in Michigan. This is a follow on to the really excellent piece about SightMachine in the Atlantic a few months back.
Crawl, Walk, Drive
February 14th, 2013 | Posted by in Ann Arbor | automation | Automation Alley | C++ | code | demo | FIRST | Maker Works | pics or it didn't happen | robots - (Comments Off on Crawl, Walk, Drive)We finally got the FIRST Team 830 drive train up an running. We still have a lot of hardware to attach, but this is a good start. currently the control system and battery are just loosely attached with cable ties. This will change once we get the final build-out of the pickup and firing mechanism. We have yet to test the pneumatic gear shifters or a PID controller so in these videos the robot is in low gear and capped at seventy percent power.
This is the first run of the robot.
Once we got used to the control I slipped my cell-phone in a spare cRIO slot and got some video.
I have a few screen captures of our current design that gives the programming team a better idea of what other subsystems we need to code and design controls for. Unfortunately I don’t have a nice overview image of the final cad design.
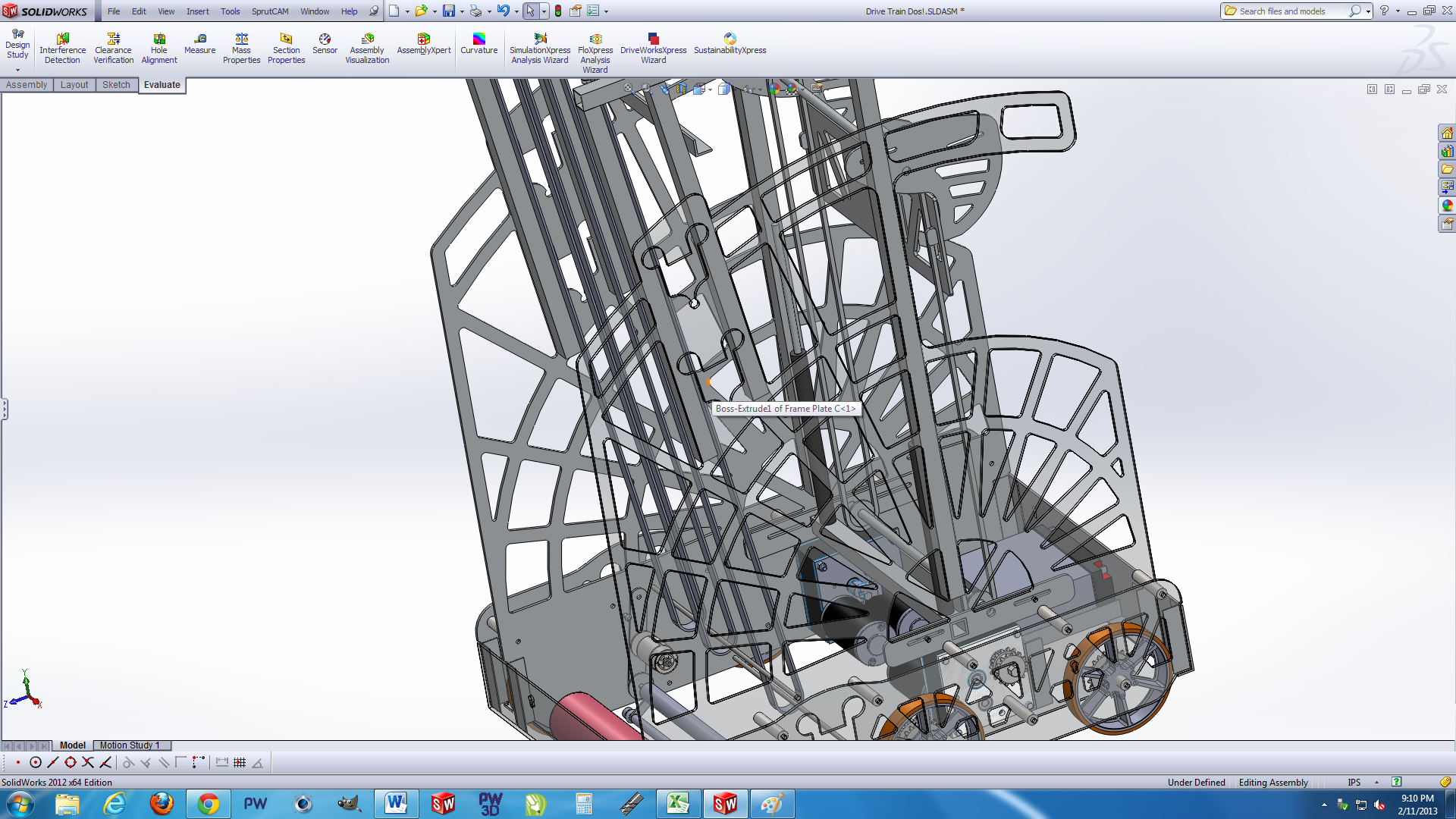
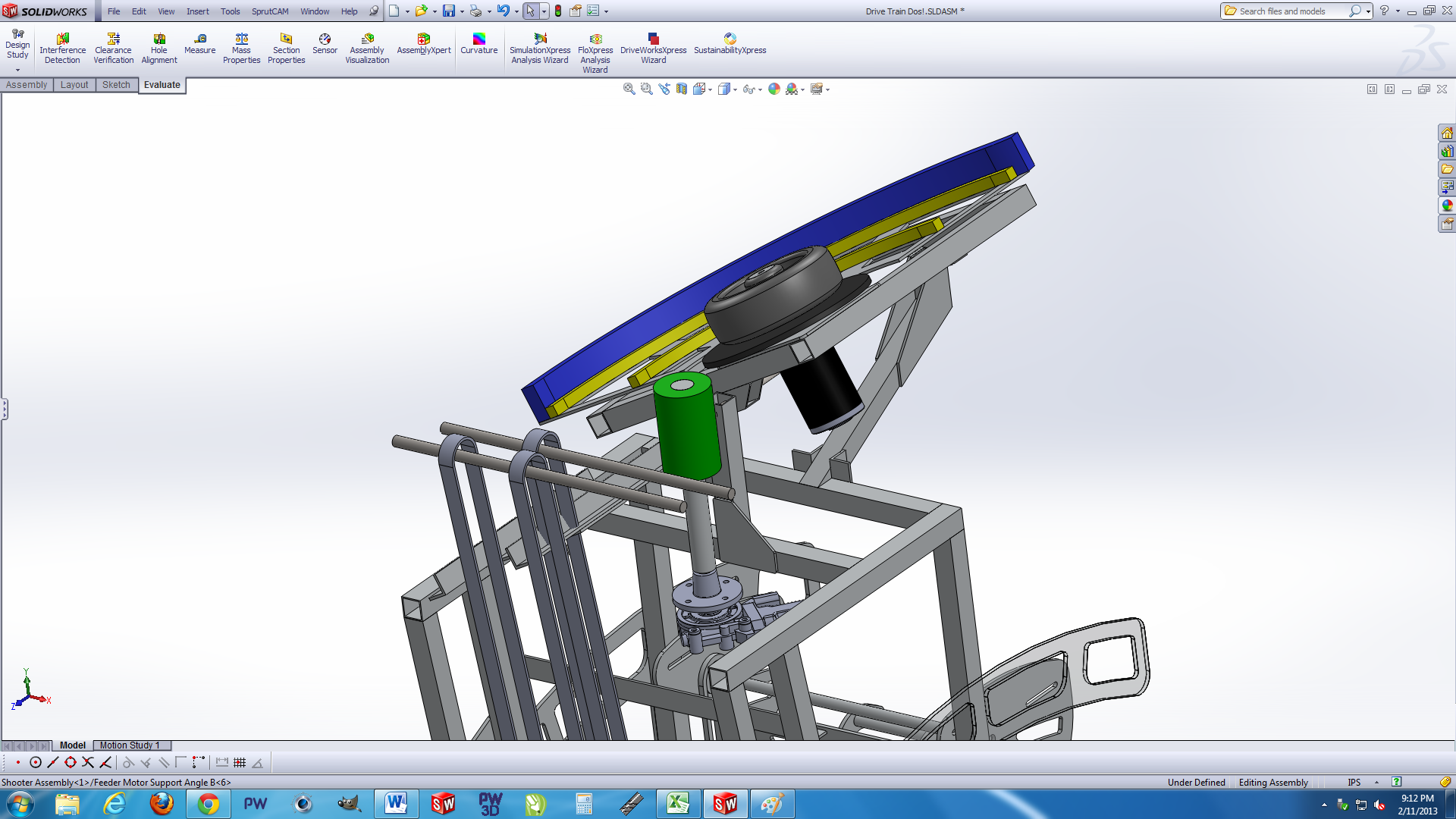
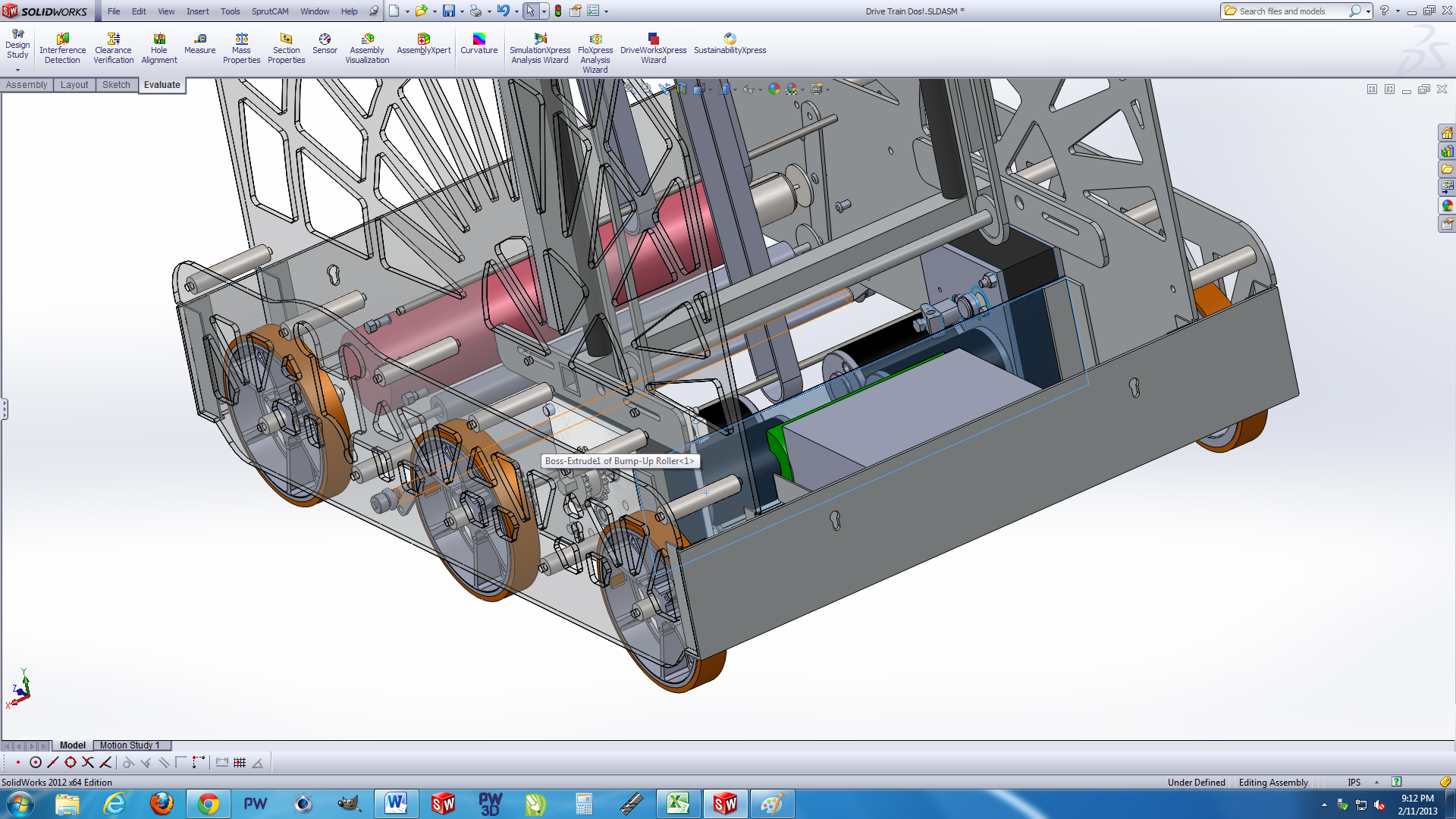
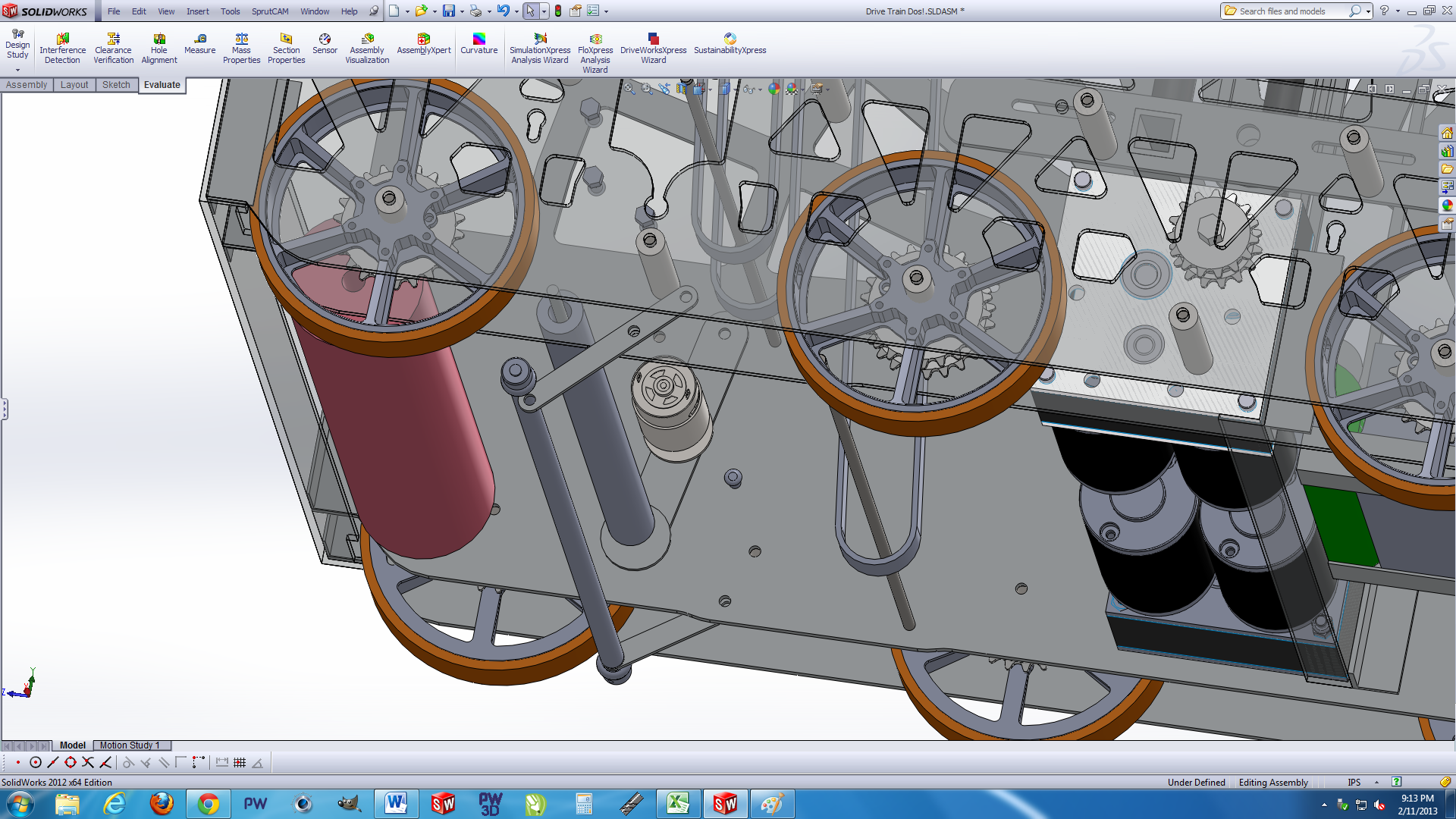
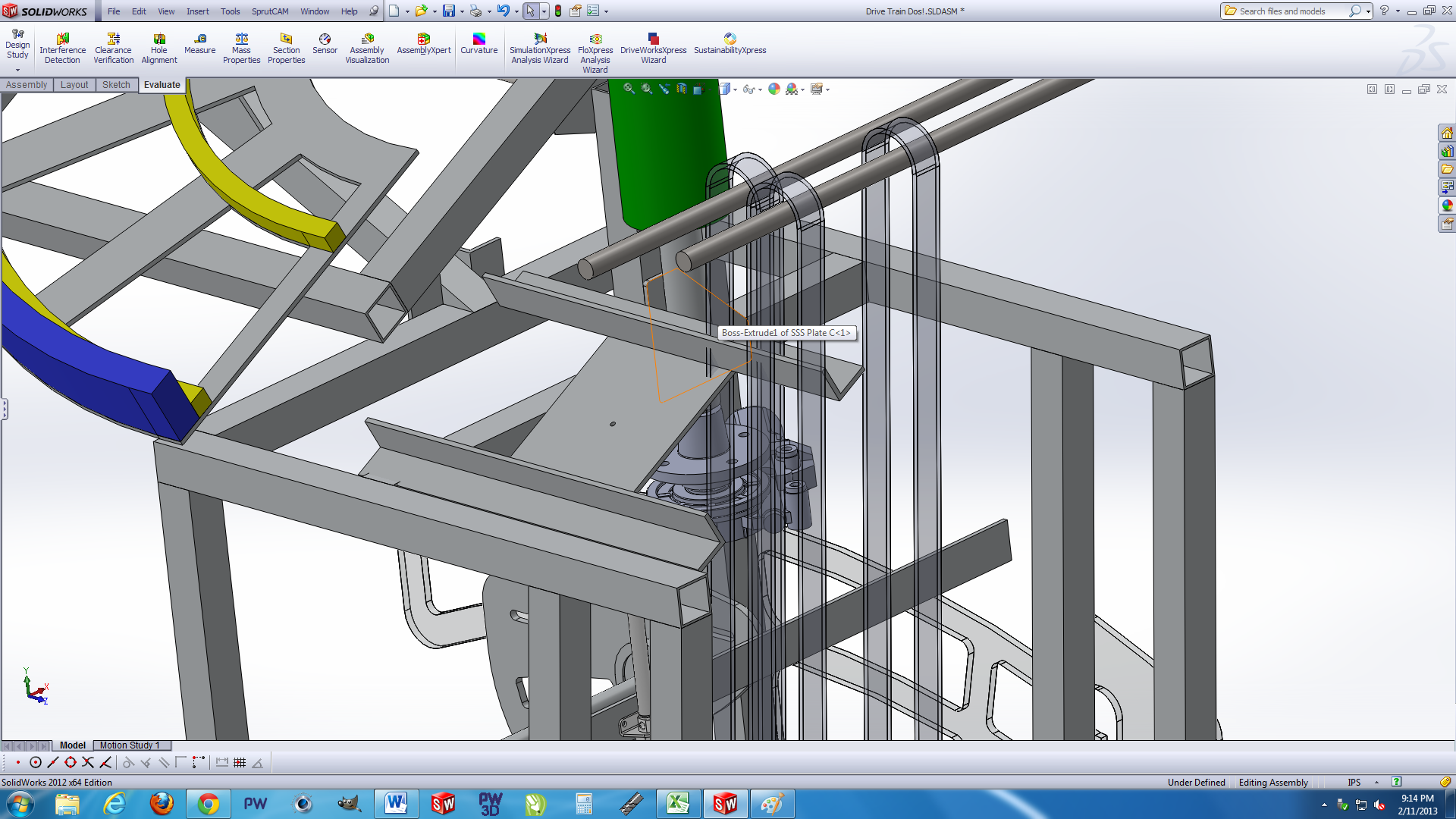
I have a few screen captures of our current design that gives the programming team a better idea of what other subsystems we need to code and design controls for. Unfortunately I don’t have a nice overview image of the final cad design.
We are down to the final week before bag and tag. Hopefully I will have more cool videos soon.