

We finally got the FIRST Team 830 drive train up an running. We still have a lot of hardware to attach, but this is a good start. currently the control system and battery are just loosely attached with cable ties. This will change once we get the final build-out of the pickup and firing mechanism. We have yet to test the pneumatic gear shifters or a PID controller so in these videos the robot is in low gear and capped at seventy percent power.
This is the first run of the robot.
Once we got used to the control I slipped my cell-phone in a spare cRIO slot and got some video.
I have a few screen captures of our current design that gives the programming team a better idea of what other subsystems we need to code and design controls for. Unfortunately I don’t have a nice overview image of the final cad design.
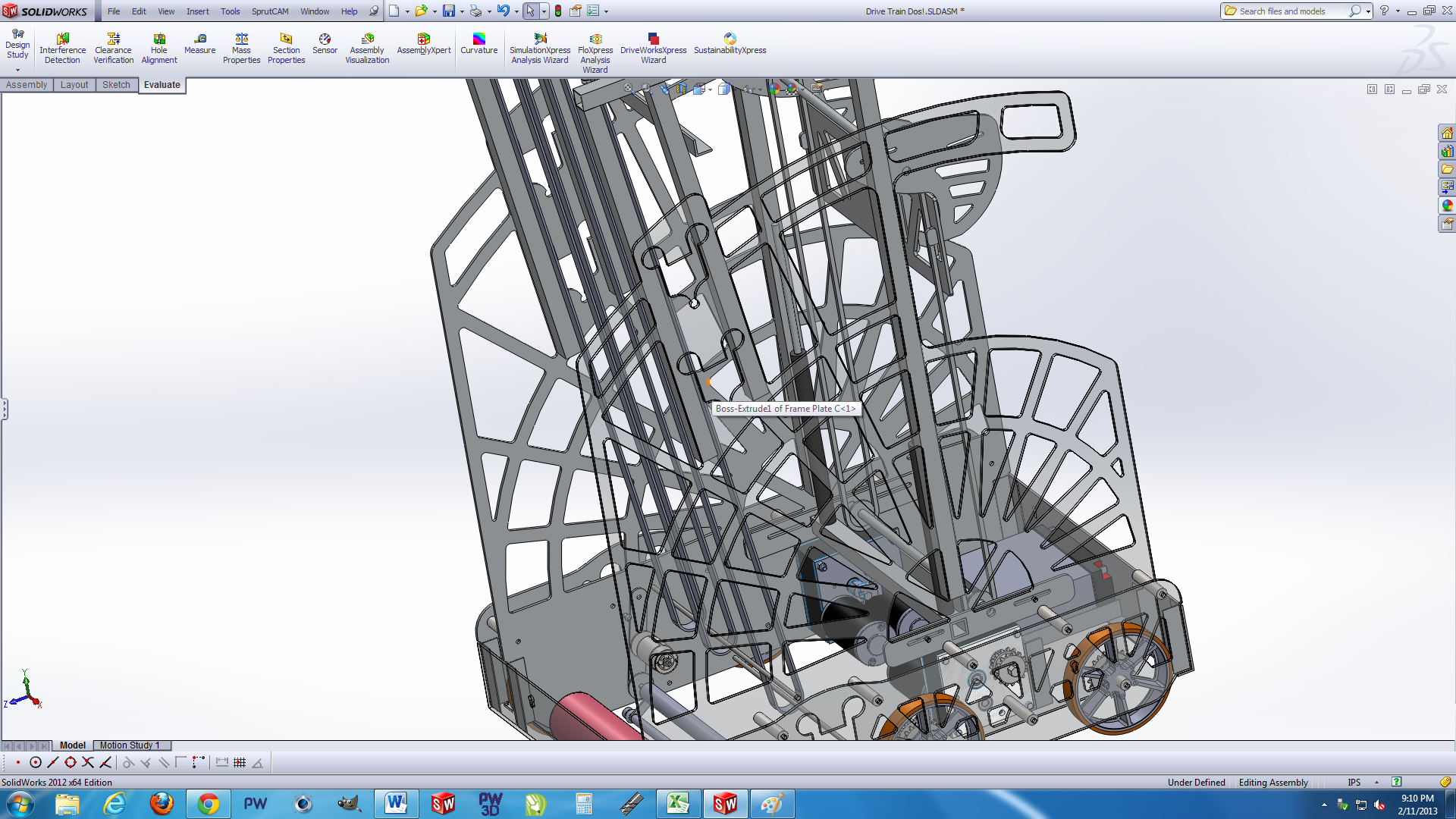
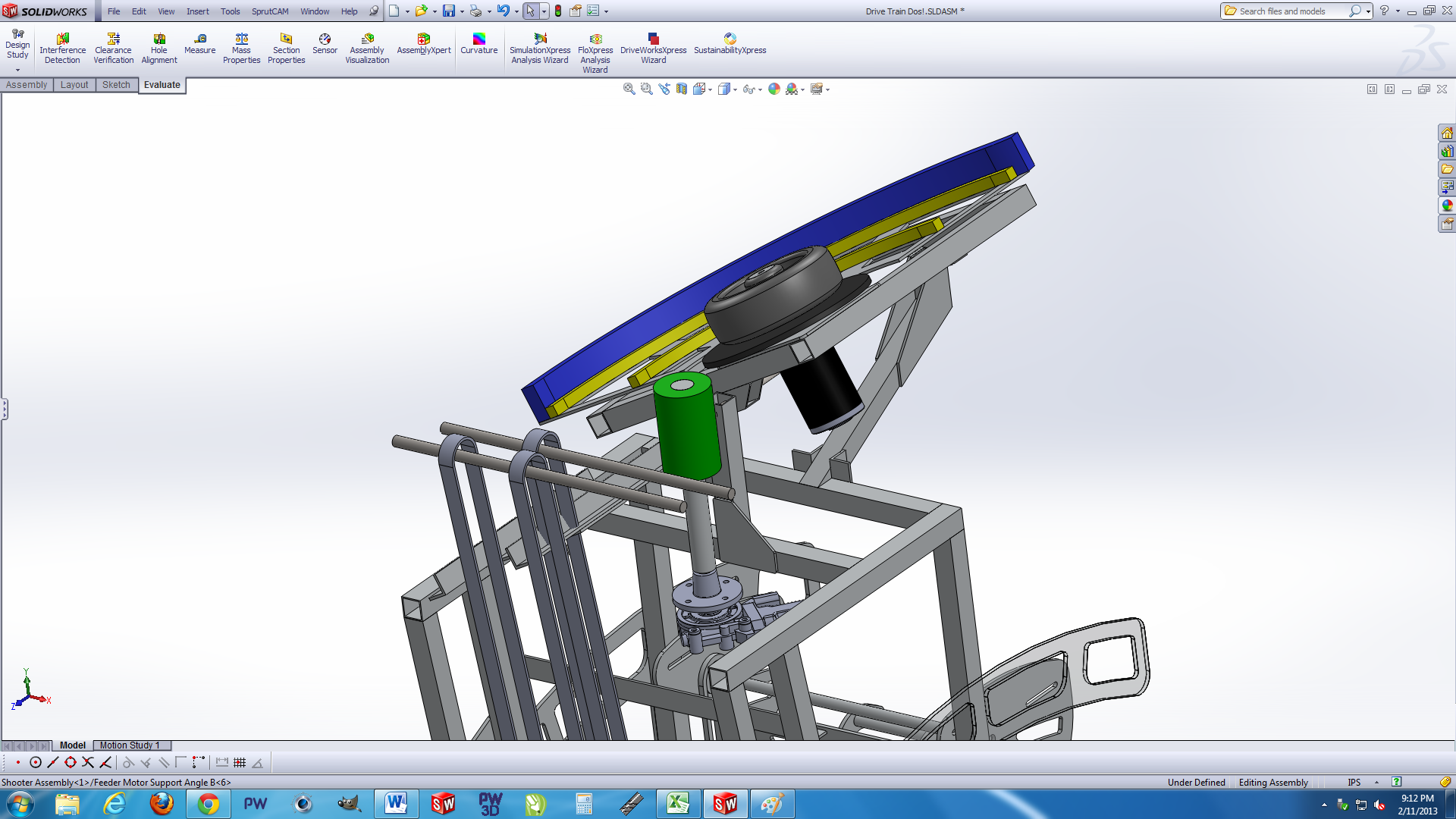
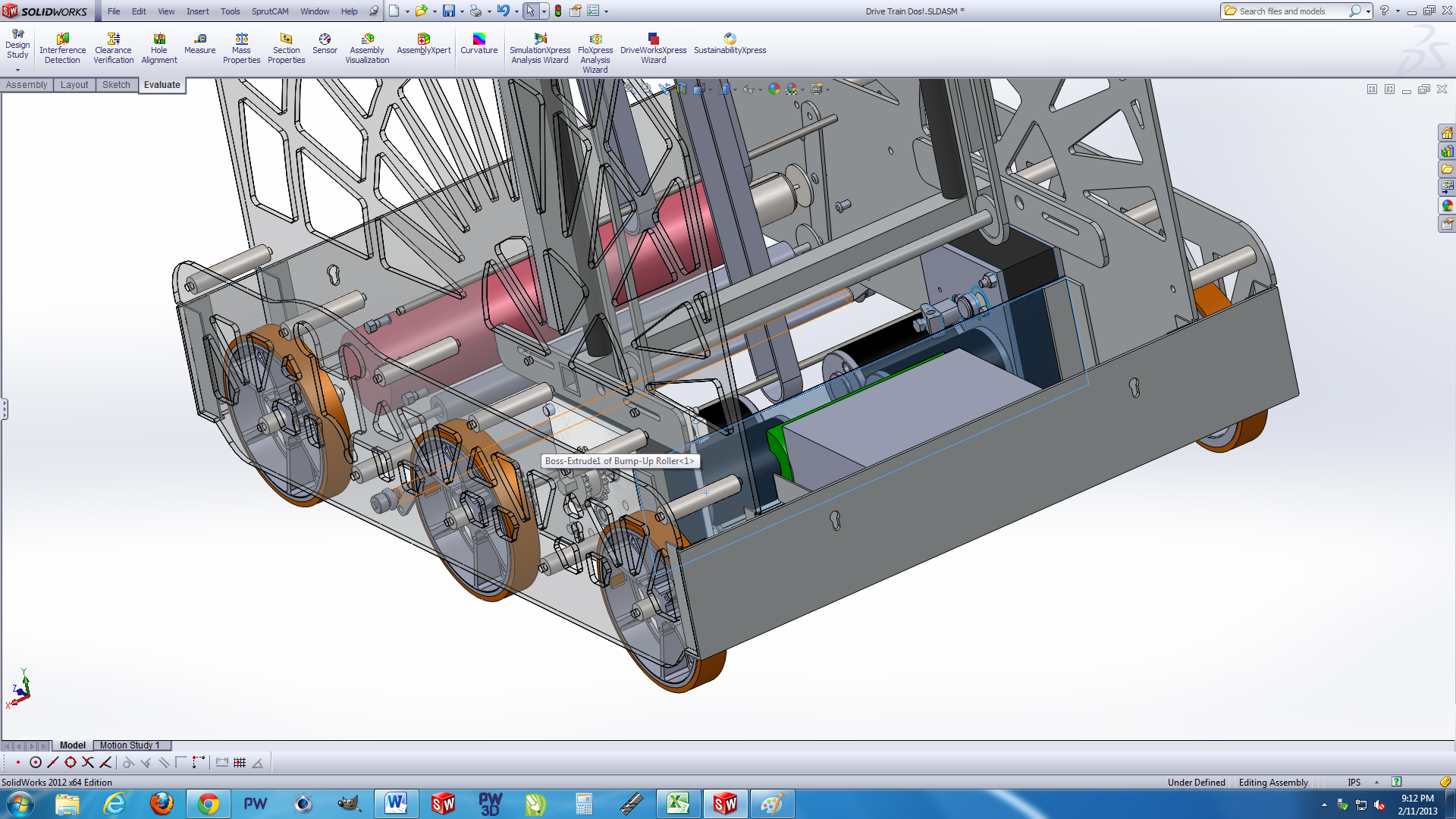
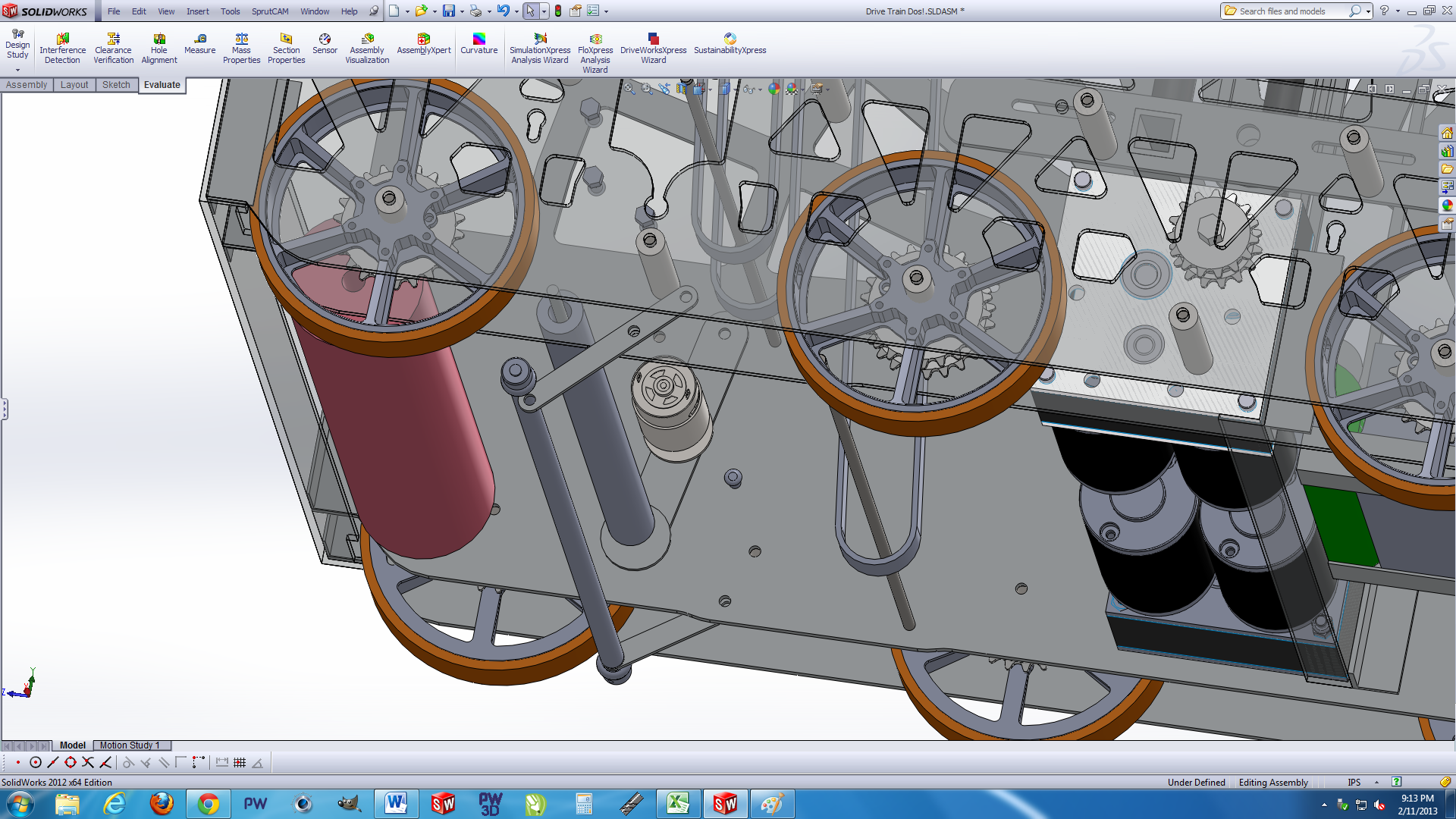
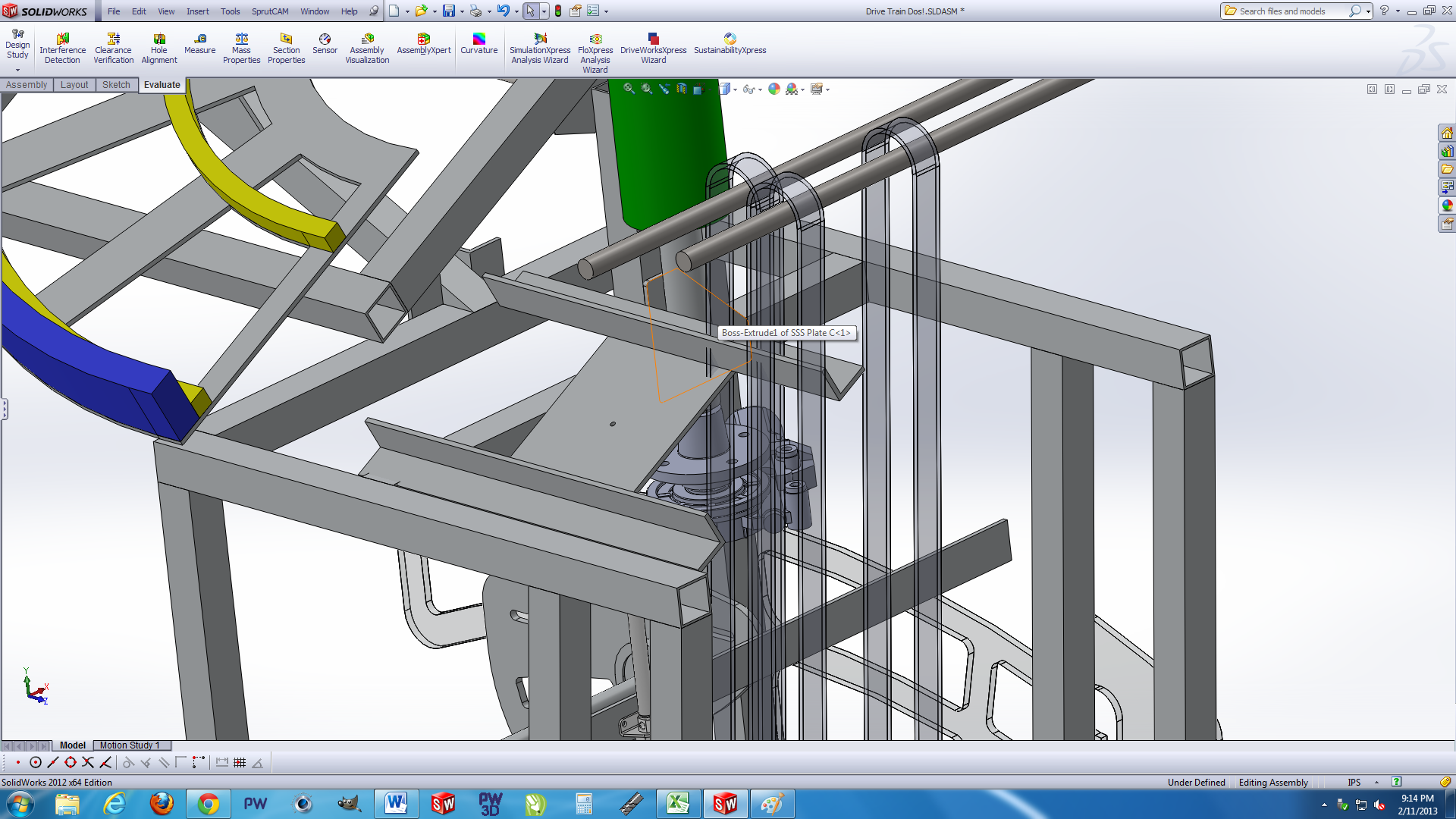
I have a few screen captures of our current design that gives the programming team a better idea of what other subsystems we need to code and design controls for. Unfortunately I don’t have a nice overview image of the final cad design.
We are down to the final week before bag and tag. Hopefully I will have more cool videos soon.